![]() データ・バリデーション&リコンシリエーション(DVR)の原理
データ・バリデーション&リコンシリエーション(DVR)の原理
(Belsim Engineering社製”VALI”)
石油精製、石油化学、一般化学、発電プラントなどの連続型のプロセスプラントにおいては、プロセスの運転状態を把握するために流量、温度、圧力、液レベルなどをリアルタイムで計測しますが、これらの測定値は多かれ少なかれ必ず誤差を含んだ値として観測されます。データ・バリデーション&リコンシリエーション(DVR)は、このような生の測定値に対して、物質収支とエネルギー収支を記述するプロセスモデルを適用することにより、プロセスの運転状態のより良い推定値を求める手法です。言い方を変えると、プロセスモデルに対する測定点の数の冗長性を利用して、プロセスモデルの関係式を全て満足し、かつ生の測定値の修正量を最小とするような推定値のセットを求めようとするものです。以下では、簡単な例に基づいて、DVRの計算手順を見て行きましょう。
計測値の”不確かさ”
プロセスプラントの計測においては、その測定原理に基づく精度の限界以外にも、様々な誤差を生む要因が存在します。その主なものを挙げると、センサーの設置条件、プロセス内部の物理現象のゆらぎ、伝送器での校正、DCSでの補正計算、データサンプリングの方法、データ転送・処理に伴う時間遅れなどが考えられます。DVR計算の適用の前提としては、これらの誤差の全てを反映した測定値の”不確かさ”が、各測定値について何らかの方法で推測できる必要があります。しかしこのような測定値の”不確かさ”を正確に予測することは困難であり、少なくとも最初はある程度経験に基づく設定に頼ることになります。なお、”不確かさ”の意味についてより詳しく知りたい方は、独立行政法人製品評価技術基盤機構のホームページ(http://www.nite.go.jp)に掲載されている「不確かさの入門ガイド」を参照してください。
計測値の冗長性
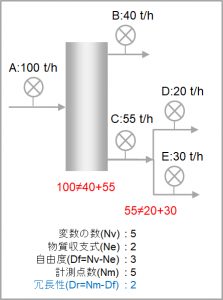 右図に示すような簡単なプロセスがあって、各プロセスラインに流量計が設置されており、質量流量が計測されているものとします。この場合、プロセスの物質収支(プロセスモデル)を表す式としてA=B+C、C=D+Eの2つの式が成り立つことがわかります。そうすると、計測点の位置にもよりますが、変数が5つ(Nv)あってそれら相互の関係を規定する式が2つ(Ne)あることから、Nv-Ne=5-2=3個の計測点があれば、理論上は他の計測点の流量は計算できることになります。言い換えれば、このプロセスの自由度(Df)は3ということです。5個の変数の全てを計測している場合、プロセスの自由度より2個多い計測値(Nm)が存在することになり、計測の冗長性(Dr)がNm-Df=5-3=2であると言うことができます。一方、実際の流量計測値はその不確かさのために、右図に示すようにプロセスの物質収支式を満足しません。このような状況は、プロセスプラントの計測では普通に見られる現象です。DVRは、この計測の冗長性を利用して、個別の計測値の不確かさを減少させると同時にプロセスモデルを満足する最良の推定値を求めようとするものです。また、これらの最良推定値を使ってプロセスの性能指標を計算したり、未測定変数の推定を行ったりすることも可能となります。
右図に示すような簡単なプロセスがあって、各プロセスラインに流量計が設置されており、質量流量が計測されているものとします。この場合、プロセスの物質収支(プロセスモデル)を表す式としてA=B+C、C=D+Eの2つの式が成り立つことがわかります。そうすると、計測点の位置にもよりますが、変数が5つ(Nv)あってそれら相互の関係を規定する式が2つ(Ne)あることから、Nv-Ne=5-2=3個の計測点があれば、理論上は他の計測点の流量は計算できることになります。言い換えれば、このプロセスの自由度(Df)は3ということです。5個の変数の全てを計測している場合、プロセスの自由度より2個多い計測値(Nm)が存在することになり、計測の冗長性(Dr)がNm-Df=5-3=2であると言うことができます。一方、実際の流量計測値はその不確かさのために、右図に示すようにプロセスの物質収支式を満足しません。このような状況は、プロセスプラントの計測では普通に見られる現象です。DVRは、この計測の冗長性を利用して、個別の計測値の不確かさを減少させると同時にプロセスモデルを満足する最良の推定値を求めようとするものです。また、これらの最良推定値を使ってプロセスの性能指標を計算したり、未測定変数の推定を行ったりすることも可能となります。
DVR計算
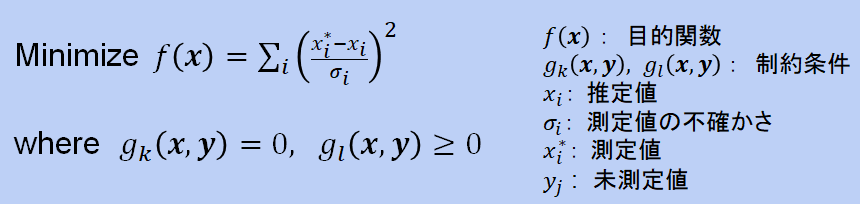
DVRの計算は、上記の例の場合のようにプロセスの自由度より大きい数の計測点が存在する(冗長な計測点が存在する)場合に、以下のように最小二乗法によってプロセスの変数の最良の推定値を求めることに他なりません。プロセスモデルは一般的には非線形の連立方程式となるので、非線形最小二乗問題を解くことになります。
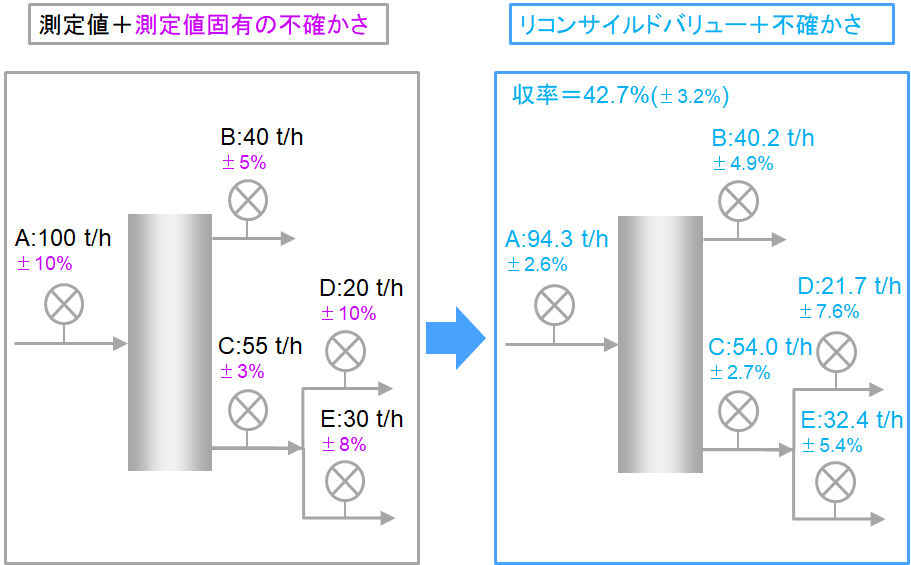
 先のプロセスの例において、もし製品Bの収率が重要な性能指標であったとすると、この値をプロセスの計測値からなるべく正確に推定したいはずです。しかし、生の測定値を使って製品Bの収率を計算する方法は、B/A、B/(B+C)、B/(B+D+E)など複数考えらえれ、右図に示すようにそれぞれ異なる値が得られるので、どれを採用すべきか迷うことになります。ここで、下図の左に示すように各計測値の”不確かさ”が推定できたとすると、上記のDVR計算を実行することが可能となります。Belsim社のDVRソフトウェア”VALI”を使って計算した結果を、下図の右に示します。”VALI”によるDVR計算によって、物質収支を満足しかつ元の計測値よりも不確かさが小さくなった推定値が、各計測点で得られていることが分かります。また、(どの収率計算式を使っても同じ結果となる)流量の推定値に基づく製品Bの収率が、その不確かさも含めて求められていることも分かります。このように、DVR計算はプロセスモデルとその自由度を上回る数の計測点が存在する場合に、各計測点の測定値の不確かさを与えることによって、プロセスモデルを満足し、かつより信頼性の高い計測点の推定値を求めることを可能とします。また、求められた推定値の関数として計算可能なプロセスの性能指標や未測定変数とそれらの不確かさも、合わせて計算可能となります。今回の例では、製品Bの収率をプロセスの性能指標として求めましたが、もし今回の例において、どれか1つの流量の計測点が計器不良などにより計測不能となった場合でも、まだ計測の冗長性が残っている(Dr=1)ので、DVR計算を実行することは可能であり、計測不能となった計測点の流量を未測定変数として推定することが可能です。ただし、その場合の各推定値の不確かさは、全体としては計器不良が無い場合より大きくなります。
先のプロセスの例において、もし製品Bの収率が重要な性能指標であったとすると、この値をプロセスの計測値からなるべく正確に推定したいはずです。しかし、生の測定値を使って製品Bの収率を計算する方法は、B/A、B/(B+C)、B/(B+D+E)など複数考えらえれ、右図に示すようにそれぞれ異なる値が得られるので、どれを採用すべきか迷うことになります。ここで、下図の左に示すように各計測値の”不確かさ”が推定できたとすると、上記のDVR計算を実行することが可能となります。Belsim社のDVRソフトウェア”VALI”を使って計算した結果を、下図の右に示します。”VALI”によるDVR計算によって、物質収支を満足しかつ元の計測値よりも不確かさが小さくなった推定値が、各計測点で得られていることが分かります。また、(どの収率計算式を使っても同じ結果となる)流量の推定値に基づく製品Bの収率が、その不確かさも含めて求められていることも分かります。このように、DVR計算はプロセスモデルとその自由度を上回る数の計測点が存在する場合に、各計測点の測定値の不確かさを与えることによって、プロセスモデルを満足し、かつより信頼性の高い計測点の推定値を求めることを可能とします。また、求められた推定値の関数として計算可能なプロセスの性能指標や未測定変数とそれらの不確かさも、合わせて計算可能となります。今回の例では、製品Bの収率をプロセスの性能指標として求めましたが、もし今回の例において、どれか1つの流量の計測点が計器不良などにより計測不能となった場合でも、まだ計測の冗長性が残っている(Dr=1)ので、DVR計算を実行することは可能であり、計測不能となった計測点の流量を未測定変数として推定することが可能です。ただし、その場合の各推定値の不確かさは、全体としては計器不良が無い場合より大きくなります。